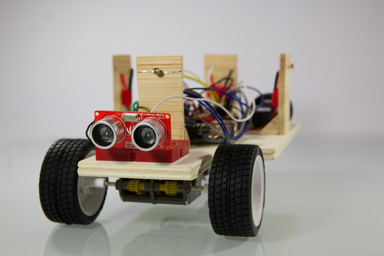
Lightbot
A robot that follows the light while avoiding obstacles.
- Thomas Herzog
- therzog@cosy.sbg.ac.at
- Nicole Kowatsch
- nkowa@cosy.sbg.ac.at
Lightbot is a mobile robot. Using its sensors, it will look for the most intense light source in its environment, and drive towards it. If it encounters any obstacles along the way, it will try to avoid them.
Documentation
- Concept Presentation
- Design Presentation
- Final Presentation
- PDF PowerPoint (incl. animations, video)
- Final Report
Code
Components
- Arduino Uno R3
- For integrating sensor data and steering the wheels.
- Frame
- Self-built wooden platform.
- 2 wheels
- 1 ball caster
- For balance.
- 2 DC motors
- For powering the wheels.
- 1 dual motor gearbox
- 1 dual motor driver
- 1 ultrasonic sensor
- For measuring distance to obstacles.
- 4 light sensors
- For detecting a light source.
- Batteries